#include <chamfer_match.h>
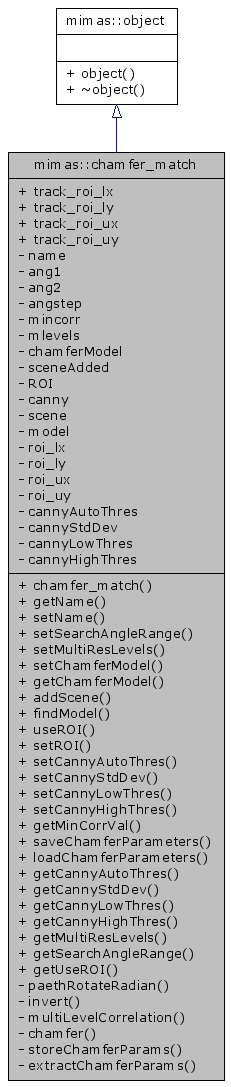
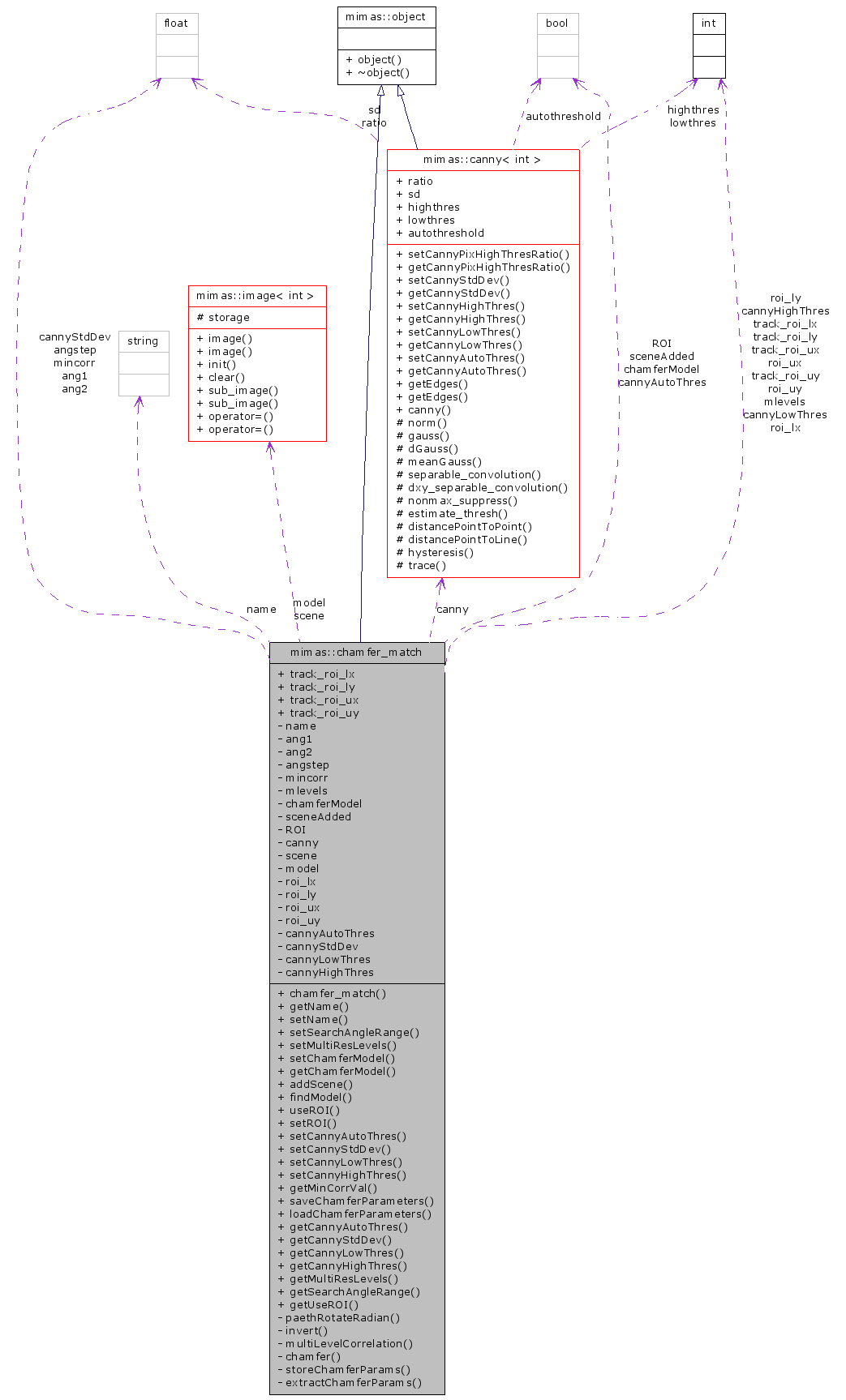
Inheritance diagram for mimas::chamfer_match:
Public Member Functions | |
| chamfer_match (void) | |
| constructor | |
| string | getName (void) |
| void | setName (const std::string &n) |
| void | setSearchAngleRange (float angle1, float angle2, float anglestep, angle_type ang) |
| rotate the models through angle1 (default=0.0) to angle2 (default=0.0) in steps anglesteps (default=0.0) when performing the search. This facility is due to the fact that chamfer matching is not inherently rotation invariant. angle_type is either {rad, deg} | |
| void | setMultiResLevels (int levels) |
| how many levels to use during multiresolution search. Default=1 | |
| void | setChamferModel (bool val) |
| does the model need to be chamfered? Default=true | |
| bool | getChamferModel (void) |
| does the model need to be chamfered? | |
| void | addScene (image< int > &sceneimage) |
| adds/updates scene image. Note that if the Canny parameters are changed then addScene needs to be called again for the Canny parameters to take effect. | |
| void | findModel (image< int > &modelimage, int &est_x, int &est_y, float &est_anglerad) throw (mimasexception) |
| find the object model given by modelimage in the scene and return the x,y locations and matched angle | |
| void | useROI (bool val) |
| use the ROI when doing recognition | |
| void | setROI (int x1, int y1, int x2, int y2) |
| set the ROI. Activate useROI(true) in order for ROI to be used. | |
| void | setCannyAutoThres (bool val) |
| autothresholding in Canny stage? Default=true; | |
| void | setCannyStdDev (float val) |
| Canny standard deviation. Default=1.0. | |
| void | setCannyLowThres (int val) |
| lower threshold for hysterisis if autothresholding is false | |
| void | setCannyHighThres (int val) |
| upper threshold for hysterisis if autothresholding is false | |
| float | getMinCorrVal (void) |
| get correlation error from last recognition | |
| void | saveChamferParameters (const char *fileName) throw (mimasexception) |
| save chamfer_match parameters to a file, including model parameters | |
| void | loadChamferParameters (const char *fileName) throw (mimasexception) |
| load chamfer_match parameters to a file, including model parameters | |
| bool | getCannyAutoThres (void) |
| autothresholding? | |
| float | getCannyStdDev (void) |
| Canny standard deviation. | |
| int | getCannyLowThres (void) |
| lower threshold for hysterisis if autothresholding is false | |
| int | getCannyHighThres (void) |
| upper threshold for hysterisis if autothresholding is false | |
| int | getMultiResLevels (void) |
| how many levels to use during multiresolution search. | |
| void | getSearchAngleRange (float &angle1, float &angle2, float &anglestep) |
| return angles are in radians | |
| bool | getUseROI (void) |
| use the ROI when doing recognition | |
Public Attributes | |
| int | track_roi_lx |
| int | track_roi_ly |
| int | track_roi_ux |
| int | track_roi_uy |
| parameters used for tracking - these does not affect the chamfer matching | |
Object recognition using chamfer matching This class performs object recognition by using chamfer maps.
Definition at line 30 of file chamfer_match.h.
| mimas::chamfer_match::chamfer_match | ( | void | ) |
constructor
| string mimas::chamfer_match::getName | ( | void | ) |
| void mimas::chamfer_match::setName | ( | const std::string & | n | ) |
| void mimas::chamfer_match::setSearchAngleRange | ( | float | angle1, | |
| float | angle2, | |||
| float | anglestep, | |||
| angle_type | ang | |||
| ) |
rotate the models through angle1 (default=0.0) to angle2 (default=0.0) in steps anglesteps (default=0.0) when performing the search. This facility is due to the fact that chamfer matching is not inherently rotation invariant. angle_type is either {rad, deg}
| void mimas::chamfer_match::setMultiResLevels | ( | int | levels | ) |
how many levels to use during multiresolution search. Default=1
| void mimas::chamfer_match::setChamferModel | ( | bool | val | ) |
does the model need to be chamfered? Default=true
| bool mimas::chamfer_match::getChamferModel | ( | void | ) |
does the model need to be chamfered?
adds/updates scene image. Note that if the Canny parameters are changed then addScene needs to be called again for the Canny parameters to take effect.
| void mimas::chamfer_match::findModel | ( | image< int > & | modelimage, | |
| int & | est_x, | |||
| int & | est_y, | |||
| float & | est_anglerad | |||
| ) | throw (mimasexception) |
find the object model given by modelimage in the scene and return the x,y locations and matched angle
| void mimas::chamfer_match::useROI | ( | bool | val | ) |
use the ROI when doing recognition
set the ROI. Activate useROI(true) in order for ROI to be used.
| void mimas::chamfer_match::setCannyAutoThres | ( | bool | val | ) |
autothresholding in Canny stage? Default=true;
| void mimas::chamfer_match::setCannyStdDev | ( | float | val | ) |
Canny standard deviation. Default=1.0.
| void mimas::chamfer_match::setCannyLowThres | ( | int | val | ) |
lower threshold for hysterisis if autothresholding is false
| void mimas::chamfer_match::setCannyHighThres | ( | int | val | ) |
upper threshold for hysterisis if autothresholding is false
| float mimas::chamfer_match::getMinCorrVal | ( | void | ) |
get correlation error from last recognition
| void mimas::chamfer_match::saveChamferParameters | ( | const char * | fileName | ) | throw (mimasexception) |
save chamfer_match parameters to a file, including model parameters
| void mimas::chamfer_match::loadChamferParameters | ( | const char * | fileName | ) | throw (mimasexception) |
load chamfer_match parameters to a file, including model parameters
| bool mimas::chamfer_match::getCannyAutoThres | ( | void | ) |
autothresholding?
| float mimas::chamfer_match::getCannyStdDev | ( | void | ) |
Canny standard deviation.
| int mimas::chamfer_match::getCannyLowThres | ( | void | ) |
lower threshold for hysterisis if autothresholding is false
| int mimas::chamfer_match::getCannyHighThres | ( | void | ) |
upper threshold for hysterisis if autothresholding is false
| int mimas::chamfer_match::getMultiResLevels | ( | void | ) |
how many levels to use during multiresolution search.
| void mimas::chamfer_match::getSearchAngleRange | ( | float & | angle1, | |
| float & | angle2, | |||
| float & | anglestep | |||
| ) |
return angles are in radians
| bool mimas::chamfer_match::getUseROI | ( | void | ) |
use the ROI when doing recognition
Definition at line 77 of file chamfer_match.h.
Definition at line 77 of file chamfer_match.h.
Definition at line 77 of file chamfer_match.h.
parameters used for tracking - these does not affect the chamfer matching
Definition at line 77 of file chamfer_match.h.