#include <match.hh>
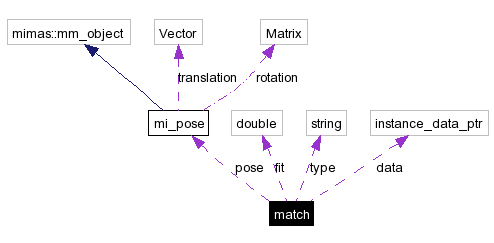
Collaboration diagram for match:
Public Member Functions | |
| match (std::string _type, mi_pose _pose, double _fit, instance_data_ptr _data=instance_data_ptr()) | |
| Constructor. | |
| const std::string & | get_type (void) const |
| Get class of recognised object. | |
| mi_pose | get_pose (void) const |
| Get pose of instance. | |
| double | get_fit (void) const |
| Get likelihood of hypothesis. | |
| instance_data_ptr | get_data (void) const |
| Get internal data for vision-method. | |
Protected Attributes | |
| std::string | type |
| Clasification of object. | |
| mi_pose | pose |
| Hypothetical pose. | |
| double | fit |
| Likelihood of hypothesis. | |
| instance_data_ptr | data |
| Internal data for vision-method. | |
This object represents a hypothesis about an instance of a class of micro-object being found in a scene.
Each recognition/tracking-algorithm deliveres a set of hypotheses to be filtered by the main method mi_recognition::recognise.
|
||||||||||||||||||||
|
Constructor.
|
|
|
Get likelihood of hypothesis. This is a value, indicating the likelihood of this hypothesis. The value is used for filtering out unlikely hypotheses later.
|
|
|
Get pose of instance.
|
|
|
Get class of recognised object. The string must match one of the identifiers in the database of micro-objects.
|
 - Tue Jan 17 15:29:15 2006
- Tue Jan 17 15:29:15 2006