#include <pol.h>
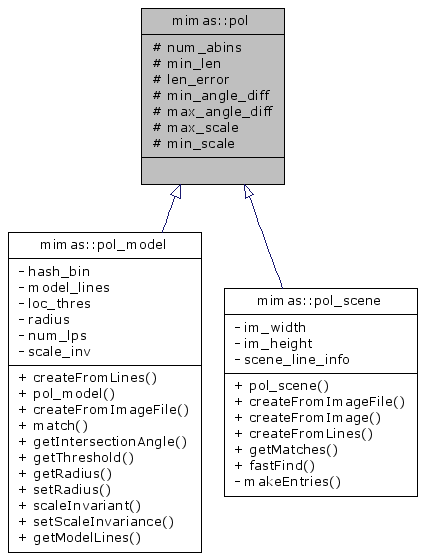
Inheritance diagram for mimas::pol:
Static Protected Attributes | |
| static int | num_abins |
| just common vars here. how many distinct angles can be measured? | |
| static double | min_len |
| minimum length of line which should be considered | |
| static double | len_error |
| lengths can be measured to +- this value | |
| static double | min_angle_diff |
| parallel lines dont contribute much info. what angles will we consider? | |
| static double | max_angle_diff |
| parallel lines dont contribute much info. what angles will we consider? | |
| static double | max_scale |
| for the scale invariant version | |
| static double | min_scale |
| for the scale invariant version | |
Another shape-based object recognition tool. Original back-of-beer-mat algorithm by stumeikle. pairwise will be better if you have a lot of models, otherwise this is ok. simple matching of pairs of lines from a model(s) and a visual scene.
Algorithm goes as follows: (roughly) extract all possible pairs of lines from a model view. organise into table based on the angles between each pair.
Do the same for a visual scene. For each pair of lines in the visual scene decide if they could be any of the model pairs of lines. If it would be possible then make an entry into a 2D hough transform for the possible centroid position of the model. Continue until all scene pairs of lines have been considered. Extract peaks from the hough and there you go.
There's a bit of optimisation included and a novel hough transform is used to estimate the orientation of the found models in the scene.
Definition at line 38 of file pol.h.
int mimas::pol::num_abins [static, protected] |
double mimas::pol::min_len [static, protected] |
double mimas::pol::len_error [static, protected] |
double mimas::pol::min_angle_diff [static, protected] |
double mimas::pol::max_angle_diff [static, protected] |
double mimas::pol::max_scale [static, protected] |
double mimas::pol::min_scale [static, protected] |