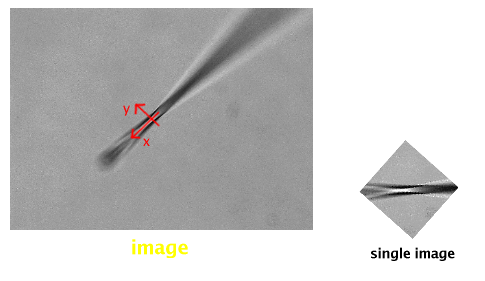
3-DOF recognition of the intersection of pipette and focal plane using a single image as template
3-DOF recognition of the intersection of pipette and focal plane using a single image as template
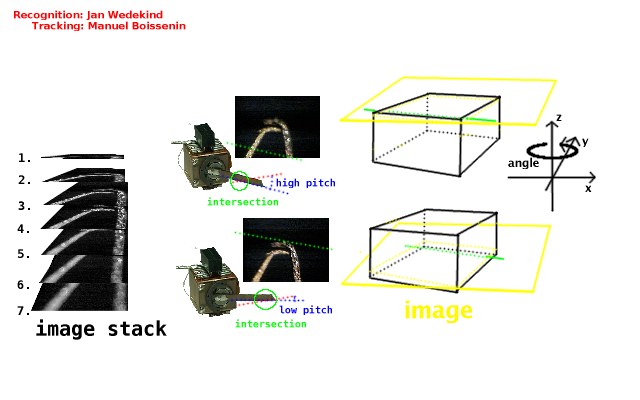
4-DOF recognition and tracking of a micro-gripper using a stack of images
 - Tue Jan 17 15:29:15 2006
- Tue Jan 17 15:29:15 2006