Autonomous Mobile Robots
From MMVLWiki
 |
 |
The official website for the Autonomous Robots Project is available on the main SHU server (http://www.shu.ac.uk/mmvl/research/research-active-Mobile-Robots.html). . Note that this Wiki page complements the contents of the official page, and is more up-to-date.
| Table of contents |
Optimal path planning applied to ant foraging
This work has been published in the paper entitled "Optimal Path Planning Applied to Ant Foraging". It takes a hybridised approach by combining a biologically evolved technique such as Ant Foraging with a mathematically evolved search technique called the A* algorithm.
This is not an attempt to reproduce the exact behaviour of ant colonies. We are more interesting in improving biologically evolved techniques to create more efficient robots.
In this experiment there are 2 kinds of breeds. One is simply the 'Ant' breed and the other is the 'Path-Finding-Ant' breed. The Ants go about their foraging with the help of two pheromone types, i.e. food pheromones and nest pheromones to create trails of food and nest respectively. The Path-Finding-Ant goes about its task which is to use the A* algorithm to find an optimal path between nest and food. Once it has been found the path, it continuously traverses between the food and the nest dropping the appropriate pheromones. The Ant breed also drop pheromones. But since the Path-Finding-Ant is more efficient it finds the path more quickly and this helps the other ants to find the path quickly thereby increasing the efficiency of foraging.
A live simulation is available here (http://vision.eng.shu.ac.uk/bala/ant-foraging/)
This work was carried out by Anand Veeraswamy under the supervision of Bala Amavasai (http://ww.shu.ac.uk/mmvl/Staff%20profiles/Amavasai.html).
Incremental perception
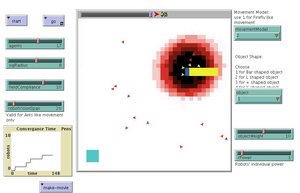
Incremental perception is the ability to combine information perceived by multiple agents incrementally so that the swarm as a whole may use it. Essentially, it is the phenomenon of information sharing by a swarm of un-intelligent robots without any explicit communication, which leads to a collective decision by the swarm.
Two simulation have been produced
- A first simulation of incremental perception (http://vision.eng.shu.ac.uk/bala/incremental-perception1)
- An improved version for complete decentralisation (http://vision.eng.shu.ac.uk/bala/incremental-perception2)
This work was carried out by Mir Immad ud din under the supervision of Bala Amavasai (http://www.shu.ac.uk/mmvl/Staff%20profiles/Amavasai.html).
Hetero/mixed species flocking
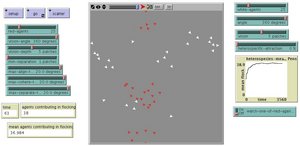
This model is an attempt to mimic the flocking of multiple agent types. The resulting motion also resembles the flocking effect in birds and schools of fish. Agents within each species are homogeneous, i.e. no leader is pre-designated to guide the motion, rather it is the local interaction between the neighbours that sets the motion.
The flocking model was first introduced by Craig Reynolds in 1986. Three rules typically "separation", "alignment" and "cohesion" is used to make the flocking movement. The simulation shown here-in is an attempt to extend the flocking model developed by Reynolds. It analyses how the presence of multiple species affects flocking motion. In this simulation, there are two types of agents: red agents and white agents. Each agent type follows three principle steering behaviours. In addition to it, the heterospecific attraction between the two types of agents govern the interaction between the two agent types.
The model developed here is inspired by mixed species flocking visible in nature. Mixed species flocking is commonly visible in forests where different species of birds are available. It is hypothesized that mixed species flocking takes place as a means of predator defence. The most popular hypothesis, in fact, is that mixed species flocking improves foraging efficiency. However this is true provided the birds have the same sort of diets and also that the species do not compete over food and in condition where food depletion is not at a risk. It is envisaged that the model would be of much importance in the area of swarm robotics and agent based systems. Still now, scientists and researchers are using the model of single species flocking in these areas. However we forsee that the model of mixed species flocking would be very valuable as this leads to increasing in flocking efficiency.
A live simulation is available here (http://vision.eng.shu.ac.uk/bala/mixed-species-flocking/mixed-species-flocking.html)
This work was carried out by Sifat Momen under the supervision of Bala Amavasai (http://www.shu.ac.uk/mmvl/Staff%20profiles/Amavasai.html) and Nazmul Siddique (http://isel.infm.ulst.ac.uk/siddique.html)
Current project members
- Mir Immad ud din, M.Sc.
- Sifat Momen, M.Sc.
Past project members
- Anand Veeraswamy, M.Sc.
- Naveed Ahmed, M.Sc.
See also
External Links
- MMVL's official Autonomous Mobile Robots website (http://www.shu.ac.uk/mmvl/research/research-active-Mobile-Robots.html)
- Arduino development board (http://www.arduino.cc/)
- Robosavvy - Advanced Robot Kits (http://robosavvy.com/)
- Active Robots - Robot Kits (http://www.active-robots.com/)
- Nao robot by Aldebaran Robotics (http://www.aldebaran-robotics.com/eng/NaoAcademics.php)
- List of robot at Linuxdevices.com (http://www.linuxfordevices.com/c/a/Linux-For-Devices-Articles/Linuxpowered-Robots-Quick-Reference-Guide/)

