#include <recognition_method.hh>
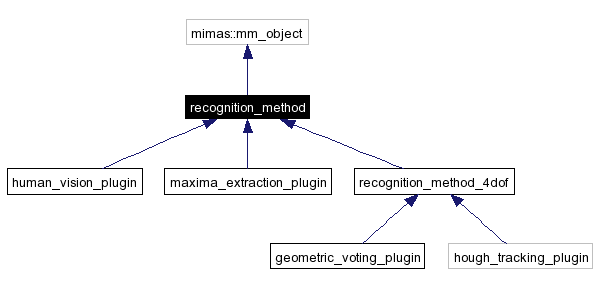
Inheritance diagram for recognition_method:
Public Member Functions | |
| recognition_method (const calibration_ptr &_calib, vision_type _type, const mimas::mm_xml_reference< XalanElement > &configuration, bool _verbose) | |
| Constructor. | |
| virtual std::vector< match > | recognise (const mimas::mm_image< unsigned char > &image, double timestamp, mi_scene_ptr scene) const =0 |
| Virtual recognition method. | |
| mi_pose | convert_pose_to_external (const std::string &type, const mi_pose &pose) const throw (mimas::mm_exception) |
| Convert internal pose of recognition method to external pose. | |
| mi_pose | convert_pose_to_internal (const std::string &type, const mi_pose &pose) const throw (mimas::mm_exception) |
| Convert external pose to internal pose of recognition method. | |
| vision_type | get_type (void) const |
| Get type of vision-method. | |
Protected Member Functions | |
| void | custom_offset (const std::string &type, const mi_pose &pose) |
| Prepend transform for internal customisation. | |
Protected Attributes | |
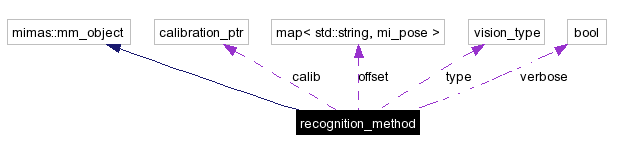
| calibration_ptr | calib |
| Calibration data. | |
| std::map< std::string, mi_pose > | offset |
| Customisation for pose of micro-objects. | |
| vision_type | type |
| Type of vision-method. | |
| bool | verbose |
| Verbosity-switch. | |
All "plugin"-classes for recognition/tracking are deriving from this class.
|
||||||||||||||||||||
|
Constructor. The constructor stores a pointer to the calibration-data and it reads the customisation-transformations for the coordinate-systems of the micro-objects.
|
|
||||||||||||
|
Convert internal pose of recognition method to external pose.
|
|
||||||||||||
|
Convert external pose to internal pose of recognition method.
|
|
||||||||||||||||
|
Virtual recognition method. This method has to be implemented by the deriving class.
Implemented in geometric_voting_plugin, human_vision_plugin, and maxima_extraction_plugin. |
 - Tue Jan 17 15:29:15 2006
- Tue Jan 17 15:29:15 2006