#include <geometric_voting_plugin.hh>
Inheritance diagram for geometric_voting_plugin:
Public Member Functions | |
| geometric_voting_plugin (const calibration_ptr &_calib, const mimas::mm_xml_reference< XalanElement > &configuration, bool _verbose) | |
| Constructor. | |
| virtual std::vector< match > | recognise (const mimas::mm_image< unsigned char > &image, double timestamp, mi_scene_ptr scene) const |
| Recognise objects using geometric voting. | |
Protected Attributes | |
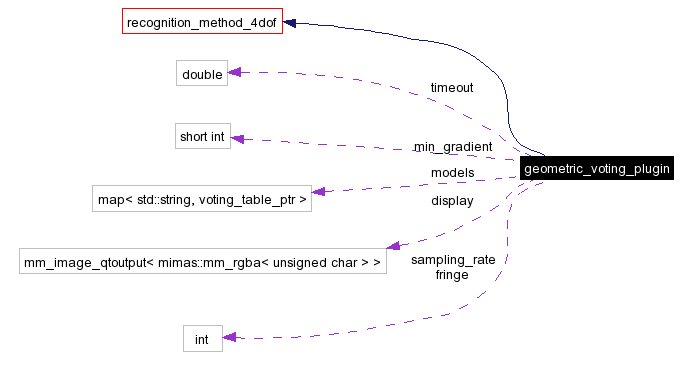
| int | fringe |
| Width of boundary to cut from image. | |
| int | sampling_rate |
| Sampling rate for sub-sampling image. | |
| double | timeout |
| Timeout for recognition. | |
| short int | min_gradient |
| Gradient threshold for feature extraction. | |
| std::map< std::string, voting_table_ptr > | models |
| Map of voting tables. | |
|
mimas::mm_image_qtoutput< mimas::mm_rgba< unsigned char > > | display |
| Display for debugging. | |
See chapter about geometric hashing in the computer vision book from Prentice Hall:
Computer Vision - A Modern Approach
Prentice Hall 2002
|
||||||||||||||||
|
Constructor. The constructor will extract the configuration from the XML-tree. For all micro-objects to be recognized with this method, voting_table objects are created.
|
|
||||||||||||||||
|
Recognise objects using geometric voting.
Implements recognition_method. |
|
|
Width of boundary to cut from image. Cutting of the boundary is required, when the image-source generates a black frame, which introduces strong gradient-features. |
|
|
Map of voting tables. The name of a micro-object-type is mapped on a voting_table.
|
|
|
Sampling rate for sub-sampling image. For performance reasons the image can be sub-sampled before processing with the specified sampling-rate. |
 - Tue Jan 17 15:29:15 2006
- Tue Jan 17 15:29:15 2006