Robot Automation Demo
From MMVLWiki
Stäubli robot is doing vision-guided pick-and-place operations (15.8 MByte WMV video) |
 |
| Table of contents |
Robot Automation Demo
Demonstration
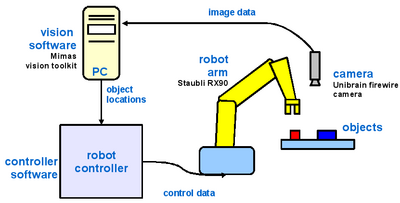
The demonstration video (15.8 MByte WMV) (http://vision.eng.shu.ac.uk/bala/meri-science-day/food-automation.wmv) shows the robot picking up circular and square-shaped objects (made of foamed material) and stacking them on the right side of the table. At the end of the demonstration the objects are sorted by shape. Bala Amavasai implemented the vision software using the Mimas-toolkit. The robot environment was set up in cooperation with Martin Howarth (http://materials.shu.ac.uk/sheafsolutions/martin_howarth.htm).
Setup
The setup is using a low-cost Unibrain (http://www.unibrain.com/) firewire camera and a laptop PC with GNU/Linux and the demo-software which was developed using Mimas. The Stäubli (http://www.staubli.com/) robot can be controlled by specifying point-to-point trajectories and giving commands for operating the gripper.
See Also
External Links
- Stäubli (http://www.staubli.com/) textile machinery, connectors and robotics
- Unibrain (http://www.unibrain.com/) firewire cameras
- Rotating calipers homepage (http://cgm.cs.mcgill.ca/~orm/rotcal.html)
- Ellips Vision Technology (http://www.ellips.nl/) grading and sorting of fruit and vegetables
- Dipix Technologies Inc. (http://www.dipix.com/) automated inspection solutions for the processed food industry
- Raque Food Systems, LLC (http://www.raque.com/) production systems for creating and packaging food
- SMErobot™ robotic initiative demo video (http://www.smerobot.org/download/#video)
- IRT/Panasonic kitchen robot (http://trendsupdates.com/kitchen-assistant-robot-washes-dishes/) (press release (http://www.irt.i.u-tokyo.ac.jp/news/kitchenrelease081217.pdf))
![]()

