I-SWARM
From MMVLWiki
Demo video of EU FP6 I-SWARM project |
Short video of the mobile platform |
 |
 |
|
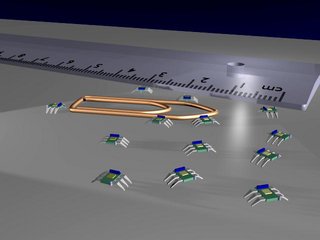
Simulation of the new I-SWARM robot. The simulation was done using the Breve Simulation Environment
|
The I-SWARM Project
The FP6-IST project 507006 (http://cordis.europa.eu/fetch?CALLER=PROJ_IST&ACTION=D&RCN=71243) called "Intelligent Small World Autonomous Robots for Micro-Manipulation" (I-SWARM) aims to take a leap forward in robotics research by combining experts in microrobotics, in distributed and adaptive systems as well as in self-organising biological swarm systems. The project aims at technological advances to facilitate the mass-production of microrobots, which can then be employed as a "real" swarm consisting of up to 1,000 robot clients. These clients will all be equipped with limited, pre-rational on-board intelligence. The swarm will consist of a huge number of heterogeneous robots, differing in the type of sensors, manipulators and computational power. Such a robot swarm is expected to perform a variety of applications, including micro assembly, biological, medical or cleaning tasks. The project will end in December 2007.
See Also
External Links
- Sheffield Hallam University
- Official MMVL's I-Swarm page (http://www.shu.ac.uk/mmvl/research/research-active-I-SWARM.html)
- MMVL's private Wiki page (http://vision.eng.shu.ac.uk/mediawiki3-1.4.10/index.php/I-Swarm)
- IPR, University of Karlsruhe
- IPR's Microrobotics Wiki page (http://microrobotics.ira.uka.de/)
- iSwarm-project video (http://wwwipr.ira.uka.de/~seyfried/I-SWARM_IST_event.avi) (12.4 MByte)
- Ant like robots using pheromones (http://www.youtube.com/watch?v=z3E86D4dKN4) (Youtube video)
- IPVS, University of Stuttgart
- Open source micro-robotic project (http://www.swarmrobot.org/)
- Project Collective Microrobotics (https://ipvszope.informatik.uni-stuttgart.de/ipvs/abteilungen/bv/forschung/projekte/Collective%20robotics/en)
- Other I-SWARM partners
- Robot videos by E.G. Papadopoulos (http://nereus.mech.ntua.gr/videos.html)
- Simulations
- Gazebo (http://playerstage.sourceforge.net/gazebo/gazebo.html) robot simulator
- Breve (http://www.spiderland.org/breve/) robot simulator
- Simulation of biological structures (http://algorithmicbotany.org/vmm-deluxe/)
- Essex Ultraswarm (http://gridswarms.essex.ac.uk/)
- UC Berkeley Rovotics
- UC Berkeley Robotics (http://robotics.eecs.berkeley.edu/)
- Silicon Microrobots (http://www-bsac.eecs.berkeley.edu/archive/users/hollar-seth/microrobotics.html)
- Micromechanical Flying Insect (MFI) Project (http://robotics.eecs.berkeley.edu/~ronf/MFI/index.html)
- JLH Labs (http://www.jlhlabs.com/jhill_cs/)
- Shadow Robot Company (http://www.shadowrobot.com/projects/addprojects.shtml)
- ATRV-JR: Cooperative Navigation for Rescue Robots (http://rescue.isr.ist.utl.pt/index.php)
- James Mc Lurkin's page at MIT (http://people.csail.mit.edu/jamesm/publications.php)
- OROCOS project: Open robot control software (http://www.orocos.org/)
- FlockBots wiki (http://cs.gmu.edu/~eclab/projects/robots/flockbots/pmwiki.php)
- List of projects at Opencores.org (http://www.opencores.org/browse.cgi/by_category)
- Centibots (http://www.ai.sri.com/centibots/tech_design/robot.html)
- Mobile Robotics Software Challenge (http://www.mobilerobot.org/MRSC.htm) 24th June, Portland, Oregon
- Varioptic liquid lenses (http://www.varioptic.com/en/products.php?cat=assessment)
- Stanford Biomimetic Robotics (http://www-cdr.stanford.edu/biomimetics/)
- Elrob2006 (http://www.fgan.de/~elrob2006/rcv_appl.html)
- Pico-microrobot built by hobbyist (http://www.poor-robot.com/pico/)
- Swarm-Bots EU project (http://www.swarm-bots.org/)
- Swarm Systems Ltd (http://www.swarmsys.com/)
- In the news
- The I-Swarm project on Discovery Channel! (http://dsc.discovery.com/news/briefs/20050912/swarmrobot.html)
- The I-Swarm project on Slashdot! (http://hardware.slashdot.org/hardware/06/02/25/217225.shtml)
- The I-Swarm project in IST-feature (http://istresults.cordis.lu/index.cfm/section/news/tpl/article/ID/80703/BrowsingType/Features)
- The I-Swarm project on Robots.net! (http://robots.net/article/1829.html)
- The I-Swarm project on ZDNet! (http://blogs.zdnet.com/emergingtech/?p=172)
- The I-Swarm project on Primidi.com! (http://www.primidi.com/2006/02/25.html#a1452)
- The I-Swarm project on heise.de! (http://www.heise.de/newsticker/meldung/71031)
- The I-Swarm project on ABC News, Australia (http://abc.net.au/science/news/stories/s1459919.htm)
- The I-Swarm project on Discovery Channel Canada! (http://www.exn.ca/dailyplanet/view.asp?date=3/31/2006)
- The I-Swarm project on 3sat! (http://www.3sat.de/delta/107955/index.html)
- The I-Swarm project on Inhabitat.com (http://www.inhabitat.com/2009/08/31/swarms-of-solar-powered-microbots-may-revolutionize-data-gathering/) (and on Slashdot again (http://hardware.slashdot.org/story/09/09/01/0228203))
- The I-Swarm project on Hizook (http://www.hizook.com/blog/2009/08/29/i-swarm-micro-robots-realized-impressive-full-system-integration)

