#include <recognition_method_4dof.hh>
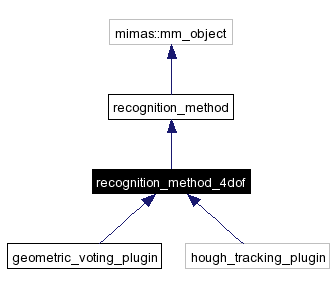
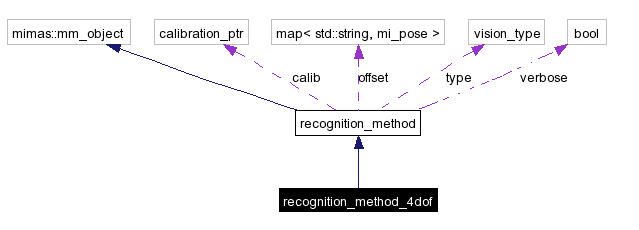
Inheritance diagram for recognition_method_4dof:
Public Member Functions | |
| recognition_method_4dof (const calibration_ptr &_calib, vision_type method, const mimas::mm_xml_reference< XalanElement > &configuration, bool _verbose) | |
| Constructor. | |
| dof4 | convert_pose_to_4dof (const std::string &type, const mi_pose &pose, double z_resolution) const |
| Convert transformation of micro-object to 4-DOF information object. | |
| mi_pose | convert_4dof_to_pose (const std::string &type, const dof4 &dof, double z_resolution) const |
| Convert 4-DOF information object to transformation. | |
The conversions to camera-coordinate system and back are done here.
|
||||||||||||||||||||
|
Constructor.
|
|
||||||||||||||||
|
Convert 4-DOF information object to transformation.
|
|
||||||||||||||||
|
Convert transformation of micro-object to 4-DOF information object.
|
 - Tue Jan 17 15:29:15 2006
- Tue Jan 17 15:29:15 2006