MiCRoN
From MMVLWiki
 |  |
 |  |
 |
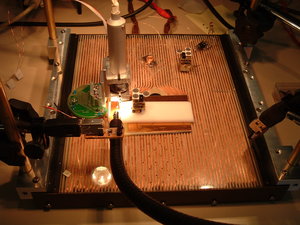
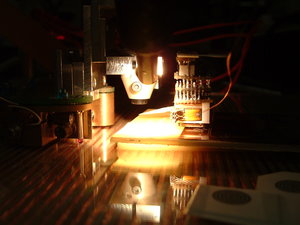
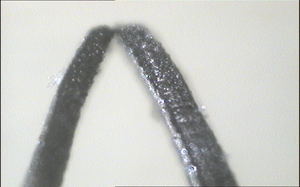
Detection/tracking of micro-gripper and capacitor More videos ...
|
 |  |
| Table of contents |
The MiCRoN Project
Objective
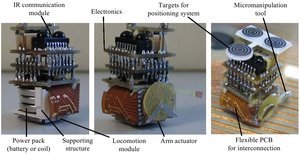
The goal of the European Union IST project MiCRoN (http://cordis.europa.eu/fetch?CALLER=PROJ_IST&ACTION=D&RCN=61495) was the development of a multi-robot manipulation system capable of handling µm-sized objects. The system is based on a small cluster of about a few cubic-centimetre-sized robots. Each robot is equipped with onboard electronics for communications and control. These robots are controlled by infrared communication and they can be equipped with various tools such as syringe-chips, grippers or AFM probes. The aim of the project was to automatically perform tasks like injecting cells with fluids or soldering SMD micro resistors. The project is finished and the MiCRoN public final report is now available (http://vision.eng.shu.ac.uk/jan/MiCRoN-PublicFinalReport-print.pdf)!
Partners
Members from Uppsala (http://www.mst.material.uu.se/), Lausanne (http://microrobotics.epfl.ch/), St. Ingbert (http://www.ibmt.fhg.de/), Athens (http://www.csl.mech.ntua.gr/), Pisa (http://www-mitech.sssup.it/), Barcelona (http://www.ub.es/), Karlsruhe (http://microrobotics.ira.uka.de/) (project-leader), and Sheffield have participated in this project. The task of the Sheffield team was to develop the computer vision software for the MiCRoN project.
Computer Vision
The MiCRoN vision software has to deal with the problem of limited depth of field. Instead of trying to overcome this, one can actually use the depth information concealed in this images to achieve real-time object recognition for microscopes.
By using focus-stacks as models it was possible to provide real-time object recognition of multiple micro-objects in up to 4 degrees-of-freedom. The micro-objects are not required to stay at a fixed distance to the camera any more. Novel automated procedures in biology and micro-technology are thus conceivable.
See Also
- MiCRoN Test Environment
- MiCRoN Microscope Environment
- Microscope Vision Software
- Microscopic pipette tip, video and ground truth
- Mimas
- MINIMAN
- Nanorobotics
External Links
- Official project page (http://wwwipr.ira.uka.de/~micron/)
- MiCRoN public final report (http://vision.eng.shu.ac.uk/jan/MiCRoN-PublicFinalReport-print.pdf)
- IPR Wiki (http://microrobotics.ira.uka.de/)
- MiCRoN project (http://i60p4.ira.uka.de/tiki/tiki-index.php?page=MiCRoN)
- MiCRoN Applications (http://i60p4.ira.uka.de/tiki/tiki-index.php?page=Applications)
- MiCRoN MMVL private section (http://vision.eng.shu.ac.uk/mediawiki3-1.4.10/index.php/Micron)
- Official MMVL MiCRoN homepage (http://www.shu.ac.uk/mmvl/research/research-active-MiCRoN.html)
- Computer Vision for Microscopes (http://www.shu.ac.uk/mmvl/research/research-active-MiCRoN.a.html)
- Microrobotics and Millirobotics Research (http://robotics.eecs.berkeley.edu/~ronf/milli-robot.html) at the University of California
- NanoWalker project (http://www.nano.polymtl.ca/en/Projets/NanoWalker/nanowalker.html)
- Microdynamic Systems Lab (http://www.msl.ri.cmu.edu/) at the Robotics Institute (http://www.ri.cmu.edu/lab_lists/index.html) of Carnegie Mellon University (http://www.cmu.edu/)
- IPR Microrobotics Wiki (http://microrobotics.ira.uka.de/)
- Wikibooks' Microwiki (http://en.wikibooks.org/wiki/Microwiki)
- 6-DOF Visual Feedback for Microassembly with two microscope cameras at ETH (http://www.iris.ethz.ch/research/micro/cad.php)
- Neurobotics (http://www.neurobotics.info/) project
- Cognitive Robot Companion (http://www.cogniron.org/) project (publication list (http://www.cogniron.org/Publications.php))
- PI Physikinstrumente (http://www.physikinstrumente.com/)
- International Micro Robot Maze Contest (http://www.mein.nagoya-u.ac.jp/maze/index.html) (especially check out the gallery of past participants (http://imd.eng.kagawa-u.ac.jp/maze/resources/index.html))
- Prototyping Folded Robots at UC Berkeley's Biomimetic Millisystems Lab (http://robotics.eecs.berkeley.edu/~ronf/Prototype/)
- Papers
- Micro manipulation by adhesion with two collaborating mobile micro robots, W. Driesen et al 2005 J. Micromech. Microeng. (http://www.iop.org/EJ/abstract/0960-1317/15/10/S02/)
- Publicity
- The MiCRoN project on electronicstalk.com (http://www.electronicstalk.com/news/she/she101.html)
- The MiCRoN project on knowledge-rich.com (http://www.knowledge-rich.com/newsarticle.aspx?nw_id=40)
- The MiCRoN project in IST-feature (http://istresults.cordis.lu/index.cfm/section/news/tpl/article/ID/80703/BrowsingType/Features)
- The MiCRoN project on Slashdot! (http://hardware.slashdot.org/hardware/06/02/25/217225.shtml)
- The MiCRoN project on Robots.net! (http://robots.net/article/1829.html)
- The MiCRoN project on ZDNet! (http://blogs.zdnet.com/emergingtech/?p=172)
- The MiCRoN project on Primidi.com! (http://www.primidi.com/2006/02/25.html#a1452)
- The MiCRoN project on Medicalnewstoday.com (http://www.medicalnewstoday.com/medicalnews.php?newsid=38455)
- The MiCRoN project on Therawfeed.com (http://www.therawfeed.com/2006/02/all-purpose-micro-robots-in.html)
- The MiCRoN project on CCN News (http://www.ccnmag.com/news.php?id=4080)
- The MiCRoN project on Innovations-Report.com (http://www.innovations-report.com/html/reports/information_technology/report-55804.html)
- The MiCRoN project on technologyreview.com (http://technologyreview.com/NanoTech-Devices/wtr_16525,303,p1.html)
- The MiCRoN project on azonano.com (http://www.azonano.com/news.asp?newsID=1917)
- The MiCRoN project on heise.de (http://www.heise.de/newsticker/meldung/71031)
![]()

