MINIMAN
From MMVLWiki
 |
 |
 |
| Table of contents |
The MINIMAN project
The EU-Esprit Project No. 33915 Miniaturised robot for micro manipulation (http://cordis.europa.eu/search/index.cfm?fuseaction=proj.document&PJ_RCN=2306861) was carried out between Oct 1998 and Jan 2002.
Objective
The goal of the MINIMAN project was to develop smart microrobot with 5 degrees of freedom and a size of a few cubic cm, capable of moving and manipulating by the use of tube-shaped and multilayered piezoactuators.
- handling and assembly of micromechanical parts under a light microscope,
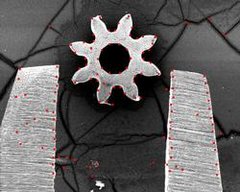
- handling and assembly of micromechanical parts in the vacuum chamber of a scanning electron microscope,
- grasping, moving and sorting of biological cells under a water-resistant optical lens.
The project is finished and you can download the report here (http://vision.eng.shu.ac.uk/jan/Miniman-PublicFinalReport-print.pdf).
Partners
Members from Uppsala (http://www.mst.material.uu.se/), St. Ingbert (http://www.ibmt.fhg.de/), Pisa (http://www-mitech.sssup.it/), Barcelona (http://www.ub.es/), Karlsruhe (http://microrobotics.ira.uka.de/) (project-leader), and Sheffield have participated in this project. The task of the Sheffield team was to develop computer vision software.
Furthermore Philips Research (PRLE) (http://www.research.philips.com/) from Eindhoven and Kammrath & Weiss GmbH (K&W) (http://www.kammrath-weiss.de/) from Dortmund were involved as industrial partners.
See Also
External Links
- IPR microrobotics Wiki (http://microrobotics.ira.uka.de/)
- Official MMVL Miniman page (http://www.shu.ac.uk/mmvl/research/past-projects/research-past-MINIMAN.html)
- Miniman public final report (http://vision.eng.shu.ac.uk/jan/Miniman-PublicFinalReport-print.pdf)
- Prototypes (http://wwwipr.ira.uka.de/~microbot/microrobs.html)

