Microscope Vision Software
From MMVLWiki
| Table of contents |
MiCRoN Microscope Vision Software
Implementation
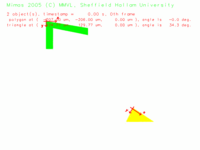
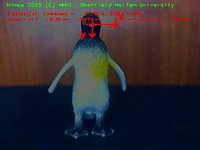
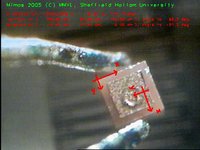
Computer vision for microscopes has to deal with the problem of limited depth of field. But instead of trying to overcome this, one can actually use the depth information concealed in this images to achieve real-time object recognition for microscopes.
Employing sobel edge detection, geometric hashing and the bounded hough transform it was possible to recognise two micro-objects in around 300 milliseconds allowing 4 degrees of freedom and then track them in consecutive frames with rates of 15 frames per second!
The software provides a framework to integrate and test different algorithms for recognition and tracking of multiple rigid objects. The parameters are stored in an XML file. The software offers a programmer's application interface, which hides the inherent complexity (black-box principle), so that the vision-system can be integrated easily in a higher level system!
Results
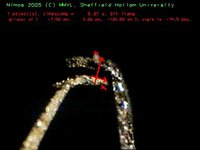
By using focus-stacks as models it was possible to provide real-time object recognition of multiple microscopic objects in up to 4 degrees-of-freedom. The micro-objects are not required to stay at a fixed distance to the camera any more. Novel automated procedures in biology and micro-technology are thus conceivable.
Geometric hashing doesn't perform very well with increasing number of objects. Currently RANdom SAmple Consensus (RANSAC) is being implemented and different types of features are being investigated. Due to real-time constraints the choice is limited however. The tracking algorithm based on the bounded hough transform on the other hand performed very well.
See sugar pushing demo for more results.
 |  |  |  |
 |  |  |  |
 |  |  |
Download

You can download the software (GPL license) and some test data to verify the results yourself!
micron-vision-2.0
You first need to install the latest unofficial release of Mimas-2.0 (http://vision.eng.shu.ac.uk/jan/mimas/) (28 MByte) of the Mimas Real-Time Computer Vision Library to be able to compile and run micron-vision-2.0 (http://vision.eng.shu.ac.uk/jan/micron-vision/micron-vision-2.0.tar.bz2) (524 kByte).
Test Data
The online documentation is here (http://vision.eng.shu.ac.uk/jan/micron-vision-docs/) and you may also want to download some test data
- Data for test test (http://vision.eng.shu.ac.uk/jan/micron-vision/test.tar.bz2) (1.67 MByte)
- Data for test test2 (http://vision.eng.shu.ac.uk/jan/micron-vision/test2.tar.bz2) (1.08 MByte)
- Data for test povray (http://vision.eng.shu.ac.uk/jan/micron-vision/povray.tar.bz2) (5.08 MByte)
- Data for test sphere (http://vision.eng.shu.ac.uk/jan/micron-vision/sphere.tar.bz2) (8.65 MByte)
See Also
- Microscope Control Software
- Microscope Environment
- Depth from Focus
- TEM vision software
-
 Mimas
Mimas
-
 Hornetseye
Hornetseye
External Links
- Online documentation (http://vision.eng.shu.ac.uk/jan/micron-vision-docs/) of MiCRoN Microscope Vision Software
- J. Wedekind, M. Boissenin, B.P. Amavasai, F. Caparrelli, J. Travis: Object Recognition and Real-Time Tracking in Microscope Imaging (http://vision.eng.shu.ac.uk/jan/IMVIP_wedekind_CR.pdf) (also see IMVIP 2006 proceedings (http://elm.eeng.dcu.ie/imvip/proceedings.html))
- N. Leibowitz, Z.Y. Fligelman, R. Nussinov, H.J. Wolfson: Multiple Structural Alignment and Core Detection by Geometric Hashing (http://www.math.tau.ac.il/~wolfson/papers/ismb99.ps.gz)
- M. A. Greenspan, L. Shang, P. Jasiobedzki: Efficient Tracking with the Bounded Hough Transform (http://rcvlab.ece.queensu.ca/~greensm/papers/GreShaJas04.pdf)
![]()

